
活動実績
平成29年5月19日 講義「デバイスの基礎」を支援しました。
講義「デバイスの基礎」
(平成27年5月22日17:30~19:00 慶應義塾大学 新教育研究棟4Fセミナールーム5)
本日は、理工学部大西公平教授による「デバイスの基礎」についての講義が行われました。ロボット作業を革新する次世代 技術、ハプティクスとロボディクスについてご説明して頂きました。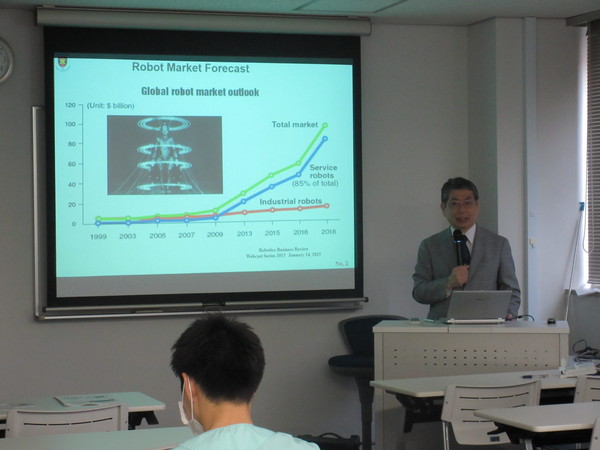
<ハプティクス 力覚通信> 力を人工的に通信することで、遠隔にある対象に触った感覚(力触覚)を再現し、あたかも自分が直接触ったように感じる技術
⇒力覚通信 行為の記録と再現
力加減を含め、動作をデータとして保存し(動作のコンテンツ化)コンピュータで通信、保存した動作をダウンロードしいつでもどこでも行為を再現することが可能
<ソフトロボティクス> 硬くぎこちない動きを脱して、柔らかく器用でしなやかな動作を実現
この二つの技術を用いることにより、従来の手術支援ロボットにはなかった力覚のある人間らしい柔らかな動作を持つ内視鏡外科手術支援ロボットの実現が可能になるそうです。
{kind=link}
その中の一つ、パプティクスの技術を用いて開発された足指で操作する義手の紹介がありました。従来の電動義手(力覚がない為、力加減ができない、把持に柔軟性がない)に比べ、力覚フィードバックと形状への柔軟性を持ち、動作時間も短縮され非常に実用的でありました。柔軟な把持によりポテトチップスの運搬や紙パックジュースを持ち、他方の手でストローをさすなどの動作も可能です。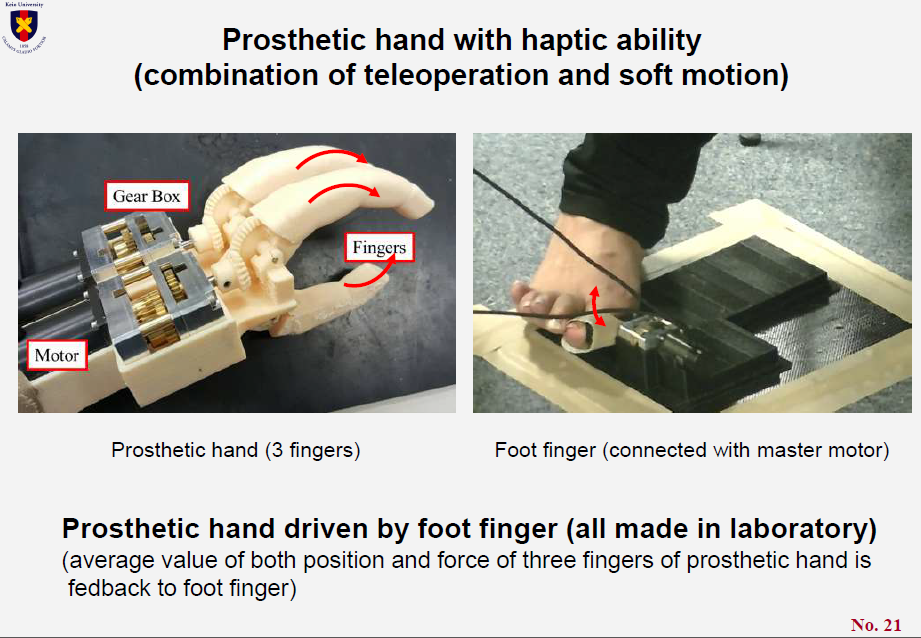
最後に、ロボットの遠隔操作で力覚がある場合とない場合でどのように感覚が違うのか、実機を用いて体感することができました。